WANG Xin1, 2, XIE Jiazhan1, 2, ZHOU Jingyang1, 2, LIU Xia1, 2, WU Rundong1, 2, WU Zhishen1, 2
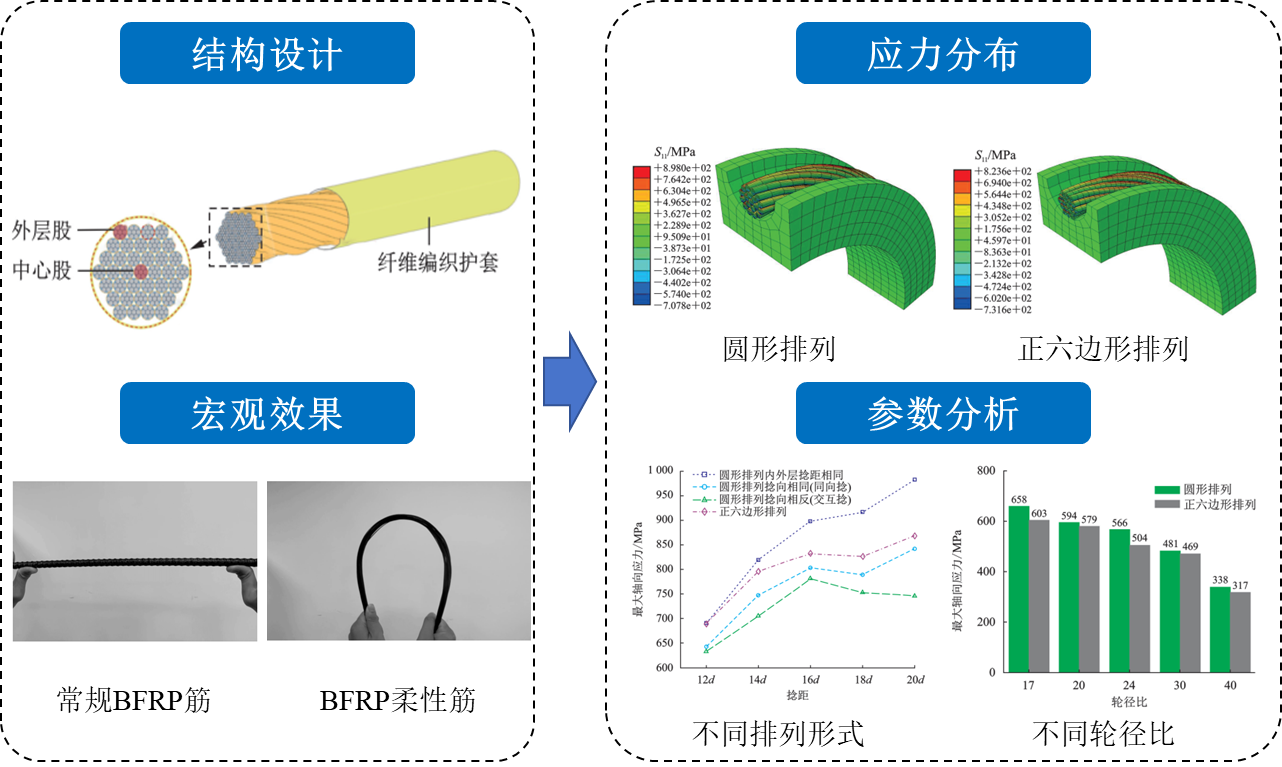
To address the problems of heavy self-weight and corrosion susceptibility of steel cables in bridge engineering, as well as the insufficient bending performance of traditional parallel fiber-reinforced polymer (FRP) cables, a novel FRP flexible cable is proposed. The proposed cable features light weight, excellent corrosion resistance, and high flexibility. Based on a three-dimensional finite element model of the FRP flexible cable, the influences of the key structural parameters including arrangement pattern, lay length, lay direction, friction coefficient, and drum-to-diameter ratio on the maximum axial stress and contact stress are systematically investigated, and the corresponding recommendations for optimal design are proposed. The results indicate that the circular arrangement exhibits superior performance in reducing contact stress,while the hexagonal arrangement provides a more uniform axial stress distribution. Adopting opposite lay directions for the inner and outer strands reduces the maximum axial stress by 11.3%. When the lay length ranges from 12d to 20d,the maximum axial stress rises with increasing lay length, while the contact stress gradually decreases. Increasing the friction coefficient helps improve the uniformity of stress distribution among strands.As the drum-to-diameter ratio increases from 17 to 40, the maximum axial stress of circular and hexagonal cables decreases by 48.6% and 47.4%, respectively. When the drum-to-diameter ratio is greater than or equal to 30, the axial stress in the outer strands remains below 70% of the ultimate tensile strength. These findings can serve as a reference for the engineering application of FRP flexible cables in highly corrosive and highly flexible environments.