The rapid expansion of neural network scale has led to an exponential growth in energy consumption and training costs, creating an urgent need for more efficient alternatives. In this context, electromagnetic domain brain-like computing, with its capabilities of light-speed operation, low power consumption, and high parallel processing, has shown great potential to break through the limitations of traditional Moore' Law and reshape the existing electronic computing paradigm. In recent years, it has received widespread attention in both academic and industrial circles. This paper reviews the fundamental concepts and development trajectory of electromagnetic domain brain-like computing. Focusing on its key technology directions, including nonlinear implementation, reconfigurability, on-chip integration capabilities, and practical application scenarios, the current research progress is systematically summarized. Additionally, the technical approaches adopted in typical literature are analyzed in depth. The future research directions of electromagnetic domain brain-like computing are prospected from multiple key dimensions, such as online training capability, system parallelism, optoelectronic integration and interface standardization, as well as computing precision, aiming to provide a reference for the development of this field.
With the rapid evolution of the electronic systems toward higher operating frequencies, higher power densities, and higher levels of integration, their working environments have become increasingly complex, characterized by the coexistence of strong electromagnetic excitation, extreme temperatures, low-pressure conditions, and radiation effects. Electromagnetically-centered strongly coupled multi-physics effects significantly impact the performance evolution and reliability of devices and systems, rendering traditional single-physics or weakly coupled analysis methods inadequate for engineering applications. Focusing on the multi-physics synergy of electronic systems within complex environments, this paper systematically reviews typical coupling mechanisms, including electromagnetic-thermal, electromagnetic-plasma, electromagnetic-thermal-mechanical, and radiation-particle interactions. Emphasis is placed on recent advances in multi-physics modeling approaches, numerical computation techniques, and their applications across device, packaging, and system levels. Through a comparative analysis of the representative studies in strong electromagnetic environments, satellite discharge environments, and irradiation environments, the major challenges currently faced by the multi-physics collaborative simulation in areas such as cross-scale modeling, nonlinear solving, computational efficiency, and uncertainty quantification are summarized. Finally, the future research directions of engineering-oriented multi-scale collaborative simulation, the fusion of physical models and data-driven approaches, and system-level reliability assessment are outlined, providing guidance for the design and protection of highly reliable electronic systems operating in complex environments.
Lightning-level high voltage may induce corona discharge at the edges of aircraft fuel tank structures, which can ignite fuel and lead to serious safety accidents. To investigate the corona inception mechanism of aircraft composite fuel tank structures in lightning high-voltage conditions, the lightning-induced corona characteristics of such structures were analyzed and experimentally tested. The variation of parameters during the corona inception and breakdown processes was examined through simulation, and a corona model was established for composite fuel tank structures in near-field lightning impulse electric fields.The electric field variation at the tank edges during corona inception was obtained, and the thresholds for corona inception and breakdown were determined. Based on the simulation analysis, the lightning-level high voltage corona inception and breakdown tests were further conducted on the composite fuel tank structure models with different sizes and shapes. The images of the corona inception process under lightninglevel high voltage were captured, and characteristic parameters such as current and electric field variations during corona inception were measured, with their varying patterns analyzed. The research results provide a basis for understanding the corona inception mechanism of aircraft composite fuel tank structures in lightning-level high-voltage environments and offer valuable insights for lightning safety assessment and protection design of such structures.
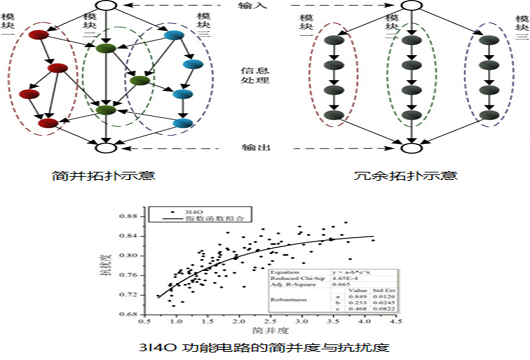
Traditional electromagnetic protection methods are no longer adequate to meet the demands of intelligent electronic systems for environmental adaptation and fault self-recovery. Inspired by biological degeneracy, a novel anti-jamming circuit design method mimicking biological degeneracy is proposed based on the research approach of electromagnetic protection bionics. By comparing and analyzing the similarities and differences between biological degeneracy and traditional redundancy mechanisms, a strategy for translating biological degeneracy into the field of digital circuit design is presented, and a quantitative calculation model for the degeneracy of digital circuits is constructed. On this basis, combining evolutionary hardware technology with the ES-NSGA multi-objective evolutionary algorithm, the optimal design of high-degeneracy anti-jamming circuits is realized. The experimental results show that there is a significant positive correlation between the anti-jamming capability and degeneracy of the evolved circuits (with a determination coefficient of 0.61). The anti-jamming capability of functional circuits with a degeneracy greater than 1.5 exceeds 0.8. The anti-jamming circuits exhibit typical biological degeneracy characteristics, possessing multiple structurally different but functionally equivalent sub-circuits, which can effectively compensate for functions under external disturbances. This research verifies the feasibility of achieving active anti-jamming by increasing circuit degeneracy, providing a new technical pathway for intelligent electromagnetic protection of digital circuits in complex electromagnetic environments.
To address the thermal-mechanical coupling damage of concrete under the impact of hypervelocity kinetic energy weapons and to compensate for the deficiency of existing mainstream constitutive models that cannot describe the thermal softening effect, this study investigates a dynamic constitutive model of concrete accounting for shock-induced temperature rise. Based on the Kong-Fang fluid elastic-plastic damage model, the temperature rise mechanism of concrete under impact loading is analyzed, and a temperature accumulation calculation method under shock wave action is established. By incorporating the coupled effect of high temperature and high strain rate, a coupled dynamic constitutive model for high-temperature and high-strain-rate conditions is developed. The model is implemented through the user-defined material subroutine interface in LS-DYNA and validated against experimental data of hypervelocity penetration into concrete targets by long-rod projectiles. The results demonstrate that the proposed model can accurately characterize the shock-induced temperature rise and its influences on material mechanical properties. When the impact velocity exceeds 3 km/s, the predicted penetration depth considering temperature rise exhibits a significant increase compared with the original model, reaching 10.8% at 5 km/s. Furthermore, the model enables precise simulation of the target damage patterns, thereby providing technical support for the design of concrete protective structures against hypervelocity impacts.
This study examines the influence of ceramic fibers on concrete strength and the strain rate effects on concrete's dynamic compressive properties. The dynamic compression tests were performed on plain concrete (PC30, PC50, PC80) and ceramic fiber-reinforced concrete (CRFRC30, CRFRC50, CRFRC80) across three strength classes (C30, C50, C80).The results show that ceramic fibers have a strengthening effect on concrete, with the best improvement in static compressive strength for PC80 and dynamic compressive strength for PC50. Both the dynamic compressive strength and dynamic increase factor (DIF) of PC and CRFRC exhibit strain rate effects, and there is a transitional strain rate for the strain rate effect of DIF. With the increase of strength grade, the strain rate effect of the dynamic compressive strength of PC and CRFRC continuously strengthens, and the transitional strain rate of DIF continuously decreases. Ceramic fibers can enhance the strain rate effect of PC dynamic compressive strength while reducing its transitional strain rate of DIF. The strain rate effect of CRFRC dynamic compressive strength is stronger than that of PC, and the transitional strain rate of DIF is smaller than that of PC.
Fiber Reinforced Polymer (FRP)-Ultra-High Performance Concrete (UHPC)-Steel Double-Skin Tubular Column (DSTC) exhibits significantly superior strength, toughness, and durability to traditional Reinforced Concrete (RC) columns due to the synergistic effect of the external FRP tube, UHPC core, and internal steel tube, showing great potential in enhancing the blast resistance of infrastructure. To evaluate the dynamic response and blast-resistance mechanisms of this composite column under close-range blast conditions, this study combines experimental testing and numerical simulation. First, the near-field blast tests are carried out on a UHPC-DSTC specimen to obtain its dynamic response and failure mode. Second, a refined finite element model is developed and validated against the test results. Finally, for a typical vehicle-borne bomb scenario, the UHPC-DSTC bridge piers and conventional RC bridge piers are designed and their blast-resistance performance is quantitatively compared. The results indicate that the UHPC-DSTC specimen mainly exhibits a local damage pattern under near-field blast loading. The outer FRP tube together with the UHPC core in the UHPC-DSTC bridge pier can effectively suppress concrete spalling in the near-blast area, significantly enhance the blast resistance of the pier, and improve its residual load-bearing capacity after the explosion.
Addressing the challenge of quantitatively evaluating the effectiveness of existing multi-dimensional resilience-enhancing protection measures for railway bridges against deliberate attacks with conventional weapons, this study first analyzes the target characteristics and functional characteristics of railway bridges, and then identifies the guidance modes of typical weapon strikes as well as the resilience-enhancing protection measures. A simulation framework using the Monte Carlo method is proposed to assess the resilience of railway bridges under various weapon strike threats. This framework includes a resilience assessment model, enabling the quantification of the effectiveness of different resilience-enhancing measures.A case study of a specific railway bridge validates the approach. The findings reveal that the effectiveness of different resilience-enhancing measures varies significantly depending on the weapon threat, with some measures being more suitable for certain scenarios. For instance, when confronted with the threat of multiple weapon strikes, priority should be given to the anti-explosion reinforcement measures of the protective layer, supplemented by the GPS signal interference measures. These two resilience protective measures have the widest scope of applications. However, when the primary threat is Brahmos cruise missiles, priority should be given to deploying a rotating angle reflector array to block its terminal guidance link,as this measure delivers a remarkable improvement in resilience. These results provide valuable insights for developing and evaluating protection strategies for railway bridges under diverse weapon threats.
In response to the need for rapid assessment of structural damage to critical targets in the context of airstrike destruction, which is essential for ensuring public welfare and post-disaster reconstruction, an assessment framework based on non-contact sensing is proposed. Firstly, a "space-air-ground" collaborative perception system is constructed, integrating wide-range monitoring by remote sensing satellites, multi-angle information collection from drones, and detailed internal inspections by crawling robots, achieving comprehensive data acquisition. Subsequently, deep learning methods for damage identification are systematically analyzed, focusing on computer vision-based techniques for various types of damage such as collapse, cracks, deformations, and displacement. The applicability of different approaches for large-scale collapse assessment, precise crack localization, quantification, and displacement damage evaluation in individual structures under airstrike conditions is discussed. Finally, the existing challenges in current deep learning-based rapid damage assessment methods are pointed out and the future research directions, including transfer learning, physics-guided learning for enhanced generalization, multi-scale correlation modeling, and lightweight network optimization are proposed to enhance real-time performance and robustness. This proposed framework provides a feasible technical pathway for post-airstrike damage assessment and reconstruction decision making.
In high-speed mobile scenarios, the linear time-varying channel causes a degradation in ranging and positioning accuracy of OFDM modulated signals. To address this issue, a localization method based on OTFS modulated signals using CAN sequences is proposed. First, the basic method for ranging with OTFS modulated signals is presented. Then, an improved ranging method is introduced by incorporating CAN pilot sequences with the optimal autocorrelation properties. Finally, the ranging results are incorporated into a time of arrival (TOA) improved model that accounts for the clock synchronization effects at both the transmitter and receiver for positioning calculation. In the simulation experiments, the ranging performance of OTFS modulated signals with different pilot sequences is compared, as well as the positioning accuracy of the improved TOA model that considers clock synchronization effects versus the original TOA model. The results demonstrate that the OTFS ranging method based on CAN sequences achieves the highest accuracy and approaches the Cramér-Rao lower bound (CRLB). Moreover, the proposed improved TOA positioning model, which accounts for clock synchronization effects, provides more accurate positioning results compared with the original TOA model.
To address the security and privacy issues in the dual-function radar-communication (DFRC) system, a covert beamforming design method for the DFRC system assisted by simultaneously transmitting and reflecting reconfigurable intelligent surfaces (STAR-RIS) is proposed. The DFRC-base station (DFRC-BS) senses target nodes while providing communication services to several private and public users with the assistance of a STAR-RIS. To ensure the data security of private users, it is necessary to implement the communication behavior between the BS and private users to be hidden from the sensing target. Firstly, a multi-objective joint optimization model based on active beamforming at the BS, the radar receiving filter, and passive beamforming at the STAR-RIS is constructed to maximize the integrated communication and sensing performance. A joint iterative optimization algorithm based on continuous convex approximation is developed to decouple and simultaneously optimize variable parameters, yielding efficient beamforming solutions.The simulation results further validate the performance of the proposed beamforming optimization algorithm and reveal the application potential of STAR-RIS in DFRC systems.
To address the issues of inaccurate detail recovery, low model precision, and errors in estimating distances on the same plane in complex urban environments, this paper designs a depth estimation network based on an interactive attention mechanism. A dual-path optimization strategy is adopted, introducing the Mix Transformer in the encoding phase to reduce information loss during feature extraction by expanding the receptive field. Meanwhile, a multi-level interactive attention fusion module is constructed to enhance the interaction between local and global information, thereby strengthening the network's detail recovery capability. A low-complexity decoder is incorporated to improve accuracy while reducing model parameters. The experimental results on public datasets demonstrate that the model effectively enhances precision, achieves accurate object boundaries, and ensures depth continuity on the same plane in the scene. Tested in real urban environments, the proposed method accurately recovers scene depth.
Zero-shot anomaly detection aims to identify anomalies not present in the training data, with its core challenge lying in learning cross-category shared patterns of normal and abnormal features from auxiliary data containing both normal and anomalous samples to achieve generalized recognition of unknown anomaly features. The existing methods are often limited to unimodal fine-tuning strategies, overlooking the potential of multimodal collaborative optimization. This paper proposes a semantic-aware text-image collaborative anomaly detection (SAT-AD) framework. In the text modality, a learnable prompt combined with an inter-class contrastive loss function is designed to effectively expand the decision boundary between normal and abnormal semantics. In the visual modality, the image patch embedding is optimized through a self-attention enhancement mechanism to improve the localization ability of abnormal areas. A cross-modal attention mechanism is introduced to focus on abnormal areas for collaborative optimization. The experiments on the MVTec AD and VisA benchmark datasets demonstrate that the SAT-AD exhibits excellent performance in anomaly detection and localization tasks under the zero-shot setting.